|
LegoMindstorm :
|
|
Im zuge der Organisation des Robolympics.ch Wettbewerb habe ich
mich auch ein wenig mit Lego Mindstorm beschðftigt. Einige Resultate und einige Links m—chte ich euch nicht vorenthalten.
Als Ausgangslage diehnte mir ein Robo Invention System 2.0. Nach einer kurzen Einarbeitungszeit, habe ich mich auf eigene
Projekte gest■rzt. So entstand zum Beispiel ein Lichtverfolger mit kurzer Ortungszeit oder ein BiPod, ein Zweibeiner der laufen kann.
|
|
|
Der "Walker" :
|


|
|
Bemerkung
|
|
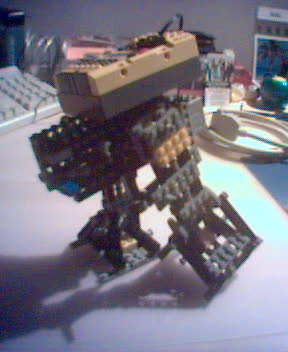
Ich habe den "Walker" nach dem Vorbild von Mario Ferrari gebaut. Allerdings nur mit Bauteilen des RIS2.0. Der "Walker"
lðuft recht langsam und unsicher, das liegt vorallem am hohen COG (Center of Gravity oder Schwerpunkt).
Auch die Winkelverstellung an den F■sen ist noch nicht perfekt. Beim Vorwðrtsbewegen des angehobenen Fusses, schleifft
dieser am Boden. Je nach Untergrund kommt der "Walker" schneller voran.
|
|
Der "Sucher" :
|


|
|
Bemerkung
|
|
Ein ganz einfaches Model, das mit Hilfe von zwei getrennten Lichtsensoren die Richtung der Lichtquelle zu
triangulieren.
|
|
Der "Scanner" :
|

|
|
Bemerkung
|
|
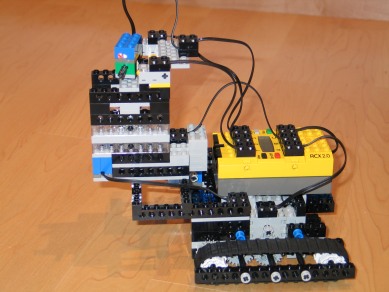
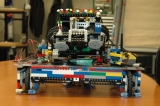
Mein zweiter Versuch einen Roboter zu bauen, welcher selbstðndig auf eine Lichtquelle zufðhrt. Der Helligkeitssensor
bewegt sich hin und her, und nimmt 5 Messungen vor. Der hellste Wert wirt zur Richtungsðnderung benutzt. Der Roboter
dreht sich dann auf die hellste Quelle zu.
|
|
Der "Plotter" :
|



|
|
Bemerkung
|
|
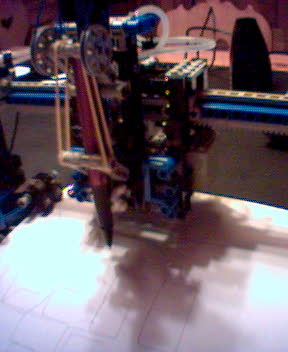
Der Plotter ist ein Model aus dem Invetor-Kit. Er kann auf einem A4-Papier in beiden Achsen zeichnen. Ein sehr
interessantes Model, inkl Pneumatik.
|
|
"Elise" :
|



|





|




|




|





|





|


|
|
Bemerkung
|
|
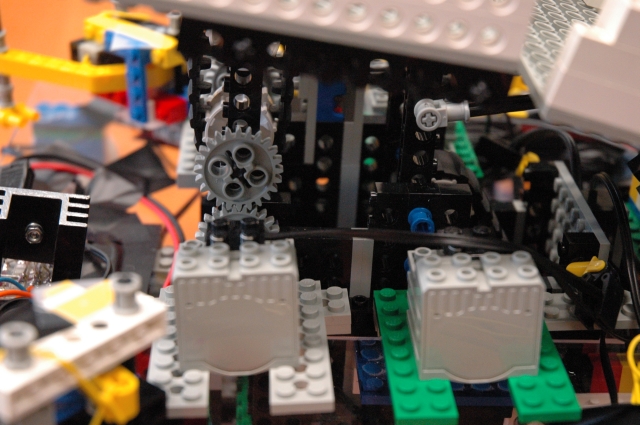
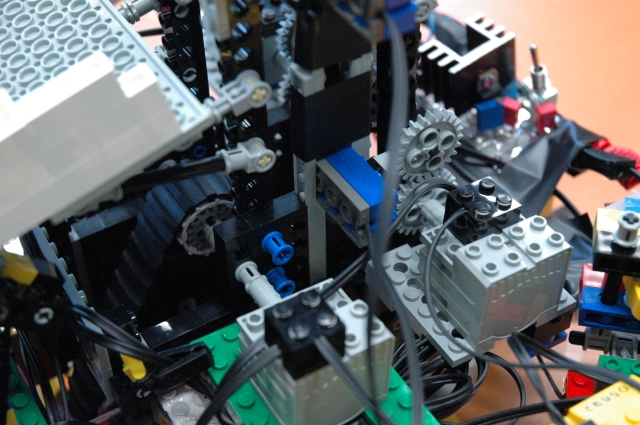
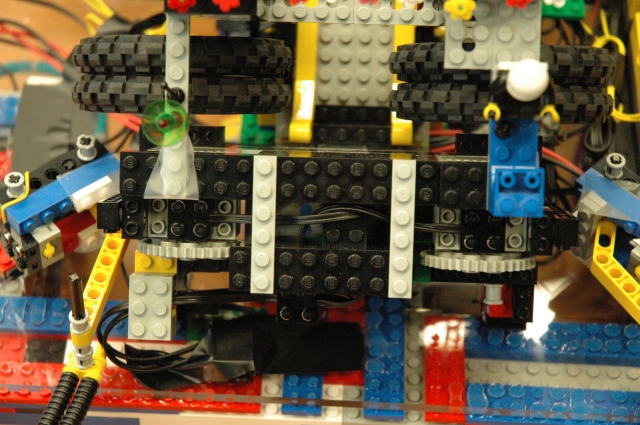
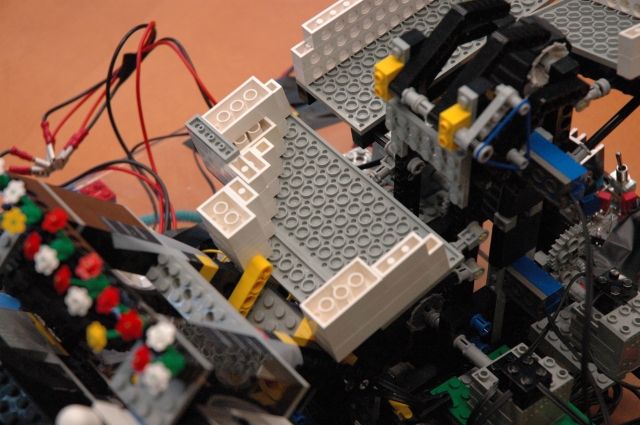
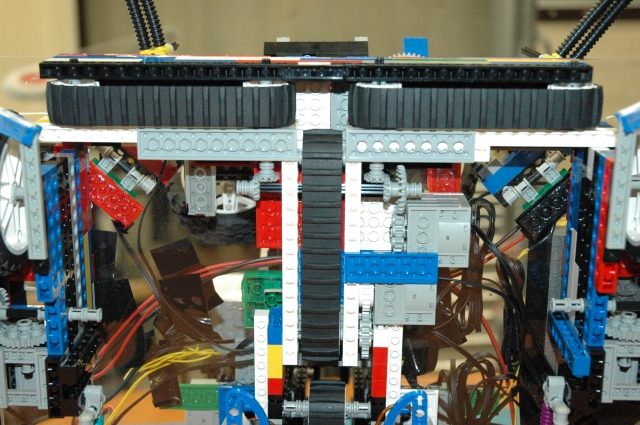
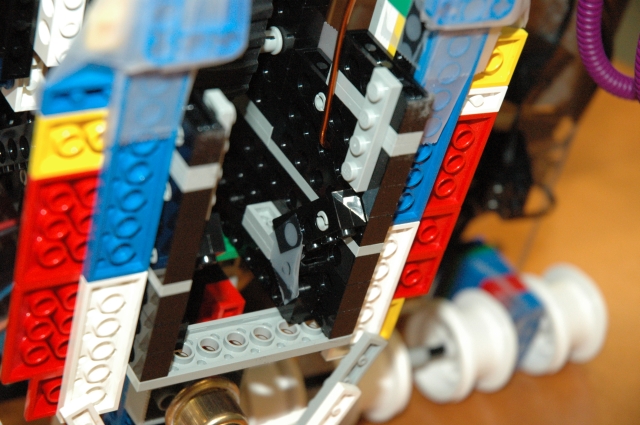
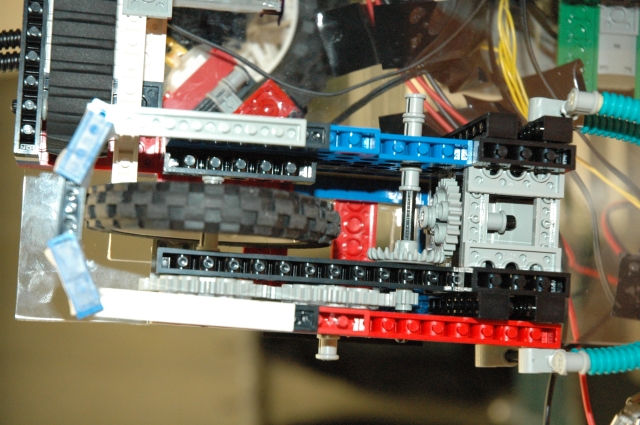
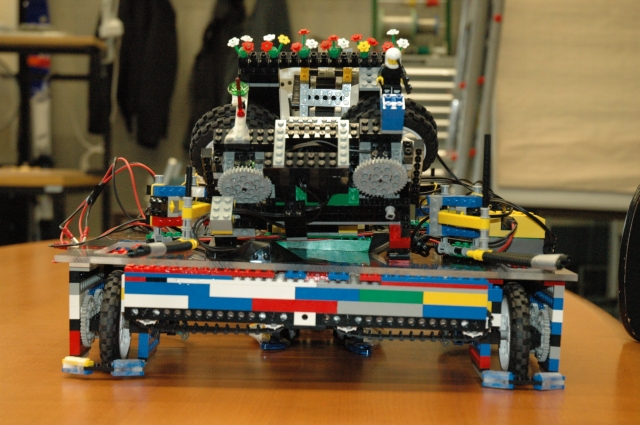
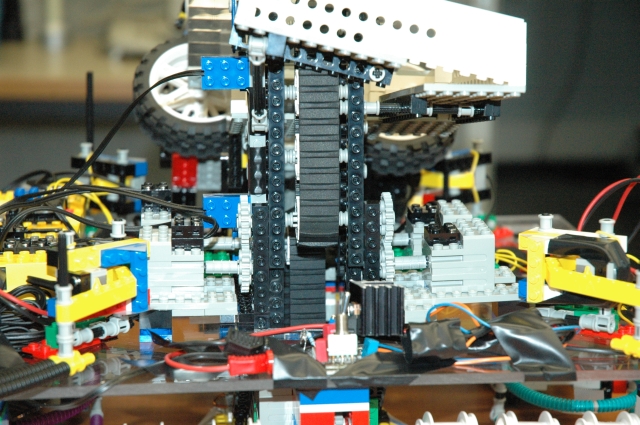
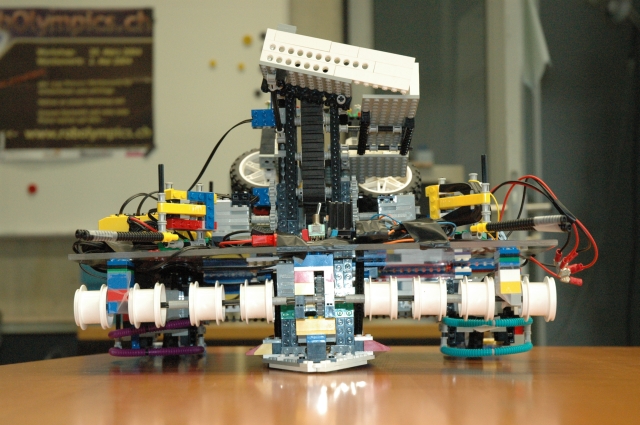
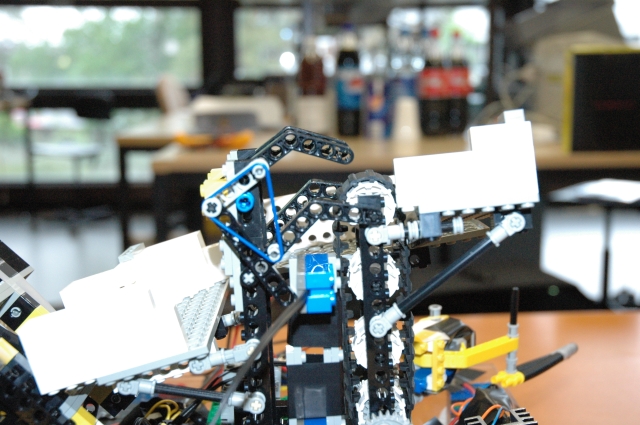
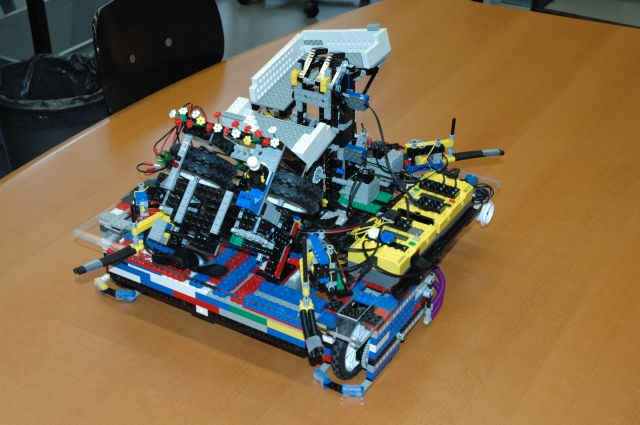
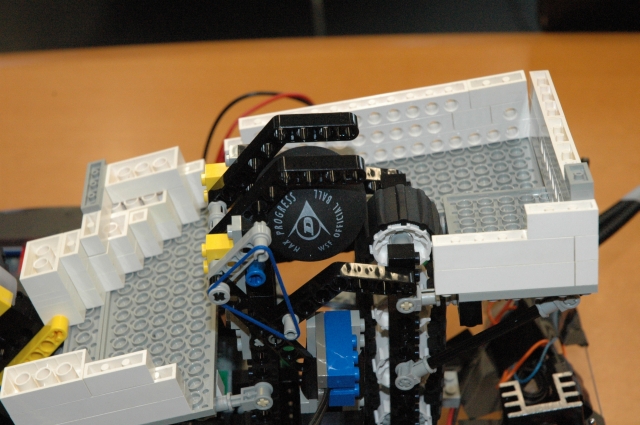
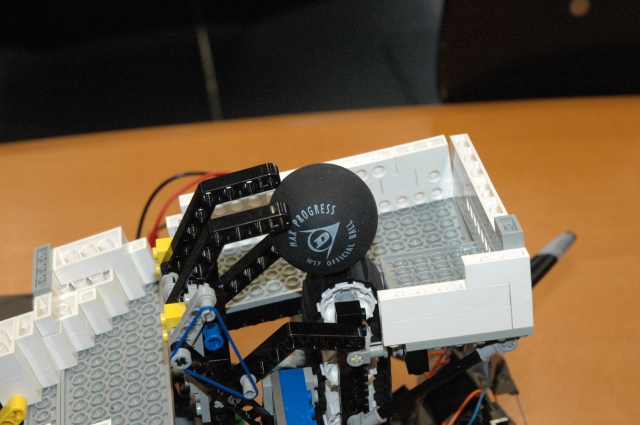
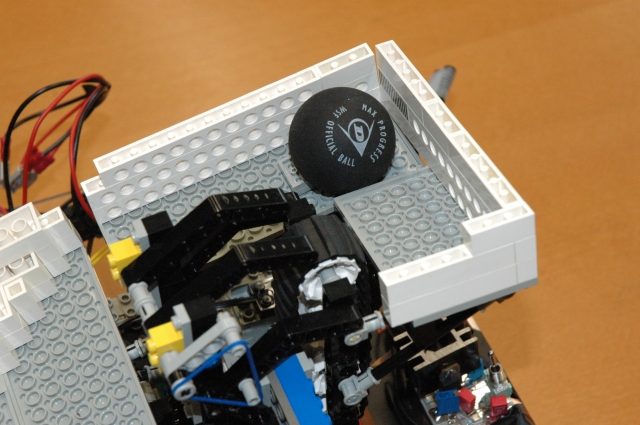
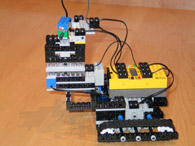
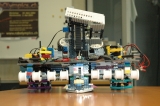
Elise entstand im zusammenhang mit Robolympics.ch Wir hatten zwei deutsche Teams eingeladen um uns einen Showkampf in der Disziplin Volleyball zu zeigen. Eines der Teams sagte ca. 3 Wochen vor Robolympics.ch ab. So mussten wir innerhalb von ca. 2 Wochen mit einem Arbeitsaufwand von ca. 20 Stunden einen Gegner f■r Team-Iwan bauen. Elise entstand. Die Aufgabe wahr: Sqash-Bðlle vom Boden des eigenen Feldes auf die Seite des Gegner zu bringen.
|
|
Links :
|
|
NQC
|
NQC stands for Not Quite C, and is a simple language for programming several LEGO MINDSTORMS products. Some of the NQC features depend on which MINDSTORMS product you are using. This product is referred to as the target for NQC. Presently, NQC supports five different targets: RCX, RCX2 (an RCX running 2.0 firmware), CyberMaster, Scout, and Spybotics.
|
|
Bricx Command Center 3.3
|
Programmierumgebung f■r NQC. Sehr komfortabel !
|
|
TinyVM
|
A Java VirtualMachine for RCX
|
|
LeJOS
|
Another Java VirtualMachine for RCX
|
|
RCX Java API
|
A platform independent Java library used to develop RCX applications
|
|
BrickOS
|
Alternatives Betriebsystem zu Mindstorm.
|
|
pbForth
|
Alternatives Betriebsystem zu Mindstorm.
|
|
The Mindstorm Sensor Page
|
Grosse Sammlung von zusðtzlichen Mindstormsensoren, auch zum selberbauen.
|
|
The Mindstorm Internal Page
|
Grosse Sammlung von n■tzlichen Informationen rund um Lego Mindstorm.
|
|
|